



- Vol.25
- バイオ7からモンハンワールドへ KCG卒業生が開発の中心的役割
- アニメと日本と世界
- ジャパンエキスポに参加して
- 初音ミクがなぜ世界で支持されるか
- 日本ユニシスと締結
- 未来環境ラボを開設
- 未来環境ラボ技術交流会
- 京都医療センターと締結
- 京都医療センター見学記
- ポケットカルテ®を医療費適正化の切り札に
- 産業界において今後IT人材の果たす役割と必要なスキル
- ANIAが30周年
- 「KCGは京大が生んだ」長谷川繁雄 初代学院長先生を偲ぶ閑堂忌
- ICTによる社会のスマート化
- 臨場感の誕生:『ブリット』のカーチェイスの表象メカニズム
- 音楽を聴く楽しみについて
- パーソナルコンピュータ博物史の刊行によせて
- 地球の色彩り鑑賞・そら(宇宙)の旅
- 古を語る星ぼし⑦ 暦の計算法
- 集団人間行動と陶器
- 偶然購入した『沫若詩詞選』から見えてきたもの
- Welcome!KCG国費留学生
- KCG校友が京都大学で博士号を取得
- KCGI2017年度春学期学位授与式の最優秀賞は山中勇矢さん
- 漢詩「八達嶺長城」
- 漢詩「詠曼殊沙華」
- ニュースこの1年「KCG365」
- KCGが共催、京まふ大盛況
- プロが求める企画書とは?ゲームクリエイターによるセミナーを開催
- 恒例のKCGサマーフェスタ2017地域住民が多数参加
- 描いた絵と一緒に写真撮ったよ!京都水族館のKCGイベント人気
- KCGIからのSAP認定試験合格者が100人を達成
- 第一人者を招き「救急災害医療」の特別講義を実施
- ゲームエンジン『UnrealEngine4(UE4)』セミナーを開催
- チームラボによるIT業界セミナーを開催
- 米田貞一郎先生安らかに。「琵琶湖周航の歌」やコンサートで偲ぶ
- ロボット動いた!しゃべったよ!KCGで児童対象のプログラミング教室を開催
- インディーゲームフェス「BitSummit」を主催し、出展
- KCGIが韓国の大学等とeラーニング・MOOCの共同研究を開始
- 米国トップビジネススクールの一行がKCGを訪問
- KCGI学生チームがイマジンカップ日本大会に出場
- アキューム25(2018年発行)掲載広告
- Vol.24
- 日本IT団体連盟が誕生
- 情報社会の未来を切り拓くために
- 応用情報学への招待
- 長谷川繁雄初代学院長没後30年
- 新たにPDP-8/IとTOSBAC-1100D「技術遺産認定機器」に
- アメリカ映画と古い仏像
- 蓬莱と徐福
- 漢詩「豊国廟懐古」
- 漢詩「春日郊行」
- けいはんなからの新しいICTの波に乗り,次世代技術への興味を!
- 京都の品格・文化性を体現するよう安全安心な運営
- 古を語る星ぼし⑥安倍晴明の子孫たち
- 世界中の学生をつなぐ歌「君は花 僕は風」
- KCGの学生チームが性犯罪撲滅へアプリを開発し発表
- ディジタル情報の多様性を支える原理
- 訃報 米田貞一郎先生
- ニュースこの1年「KCG365」
- KCGとKCGIが京都府警と人材育成に関する協定を締結
- 「顧客の声聞き新IT展開を」。京情協講演で大元氏
- インディーゲームフェス「BitSummit 2015」を共催し出展
- KCGIが京都府と包括協定を締結,官学連携し京都ブランド発信
- IT声優コース学生に声優のKINAKOさんが指導
- 大連外国語大の学生がKCGIで短期研修
- ERP人材育成に向けKCGとKCGIがクレスコ社と協定締結
- 日本が僅差で台湾破る!CGアニカップに多数のファンがKCGへ
- 京情協,KCGIが企業情報セキュリティ支援ネットワークに参画
- 日本e-Learning大賞・ウェアラブル部門賞に輝いたKCGIを表彰
- 京都廣学館高校と連携協定を調印,出張授業を通じ生徒に専門教育
- KCGIがIPAの「IT起業家育成カリキュラム協力機関」に
- 2016年度からKCGI入学定員を240名に。開学時の3倍
- アキューム24(2016年発行)掲載広告
- Vol.22-23
- KCGグループ創立50周年
- 京都コンピュータ学院創立50周年・京都情報大学院大学創立10周年記念式典
- 式辞 京都コンピュータ学院・京都情報大学院大学統括理事長長谷川亘
- 祝辞 京都情報大学院大学 設立発起人 株式会社堀場製作所 最高顧問 堀場雅夫様
- 祝辞 ボスニア・ヘルツェゴビナ 特命全権大使 ペロ・マティッチ 閣下
- 祝辞 キルギス共和国 特命全権大使 リスベク・モルドガジエフ 閣下
- 祝辞 パプアニューギニア独立国 特命全権大使 ガブリエル・ジョン・クレロ・ドゥサバ 閣下
- 祝辞 京都府 副知事 山下 晃正 様
- 祝辞 京都市 市長 門川 大作 様
- 祝辞 韓国・大統領直属情報保護委員会 コミッショナー 韓国CSO協会 会長 李 弘燮 様
- 祝辞 京都大学 総長 松本 紘 様
- 祝辞 ロチェスター工科大学 プロボスト(筆頭副学長・副総長) ジェレミー・ヘフナー 様
- 祝辞 天津科技大学 副学長(学長代理) 張 愛華 様
- 記念講演会サイバーフィジカル世界でつくる「京都」美濃 導彦 氏
- 祝賀会
- 祝電・祝辞
- 記念行事
- 京都情報大学院大学 創立10周年記念式
- 最新OS Windows 8のストアアプリ開発
- グーグルがやろうとしていることと,ICTの新地平
- スーパーコンピュータ「京」10ぺタフロップスへの挑戦
- VFXと世界的パラダイムの変化
- ロボット時代の創造
- これからのものづくり〝中小企業の挑戦〞
- 全国同時七夕講演会@KCG-2013年の天文トピックスは大彗星到来
- 鉄道の音から電車運転士教育 システム・シミュレータまで
- コードの未来
- 歓迎アイソン彗星
- イノベーションは止まらない
- 中澤きみ子 ヴァイオリン・リサイタル 〜千の音色に思いを寄せて〜
- 三重奏の柔らかな調べ 「ウィーンのトリオ」
- 摩天楼オペラ 彩雨式 情報化社会と音楽について
- アメリカザリガニ平井のITって面白い!講座
- 若手ゲームプロデューサーズ!ゲームとITの未来
- ボカロとゆるキャラとアイドル 表現の進化系
- PCは娯楽の友!
- 御礼
- 京都コンピュータ学院創立50周年・京都情報大学院大学創立10周年記念式典
- 初代学院長の思い出
- 京都自動車専門学校がKCGグループに
- 京都マンガ・アニメ学会を設立
- 「京都国際マンガ・アニメフェア(京まふ)」共催
- ジャパンエキスポに参加して
- 「初音ミク」の生みの親・伊藤博之氏がKCGI教授に
- IT声優コース&マンガ・アニメコース新設
- 古を語る星ぼし⑤ 客星現る!
- 天文シンポジウム「歓迎 アイソン彗星」
- 「.kyoto」いよいよ2015年から運用開始
- 「MUΣA」コンサート by Nitza
- やさしそうに見える電話番号の難しさ 総務大臣賞を受賞して
- ANIA会長に本学の長谷川統括理事長が就任
- 「カワサキZの源流と軌跡」発刊
- 漢詩「新年作」
- 漢詩「詠大覚寺観月祭」
- KCGチームがマイクロソフト学生ITコンテスト Imagine Cup 日本大会で優勝!
- 京都情報大学院大学初代学長 萩原 宏先生が永眠 学校葬・追悼式を挙行
- 追悼文
- 電子計算機と共に歩まれた2の6乗年
- 情報工学の必要性を熱く語り,行動された萩原宏先生
- 追悼文
- 弔電
- 萩原宏先生を偲ぶ
- 萩原先生の短いコメントに込められた大切なもの
- 中国の文学や歴史に造詣が深かった萩原先生
- 萩原先生の思い出
- 萩原宏先生,有り難うございました
- ご恩に深く感謝
- 「KT-Pilot」の開発でご一緒
- 萩原宏先生を偲んで
- 夫婦ともどもお世話になりました
- 萩原先生の思い出
- 萩原宏先生,ありがとうございました
- 泉下から聞こえる柔らかくまた厳しいご叱声
- 教員転身への礎をくださった
- お菓子で団らんの後の本質突く「一言」
- 萩原先生,また季節の果物を持ってお話に伺います
- 萩原先生から学んだこと
- KT-Pilotのこと
- 新たな木の芽を生み出し,先生に報いたい
- 宇田敏彦先生 追悼
- 仙元隆一郎先生 追悼
- 植原啓之先生 追悼
- KCG365 2013 - 2014
- アキューム22号-23号(2015年発行)掲載広告
- KCGグループ創立50周年
- Vol.21
- Vol.20
- 誕生! 京都情報大学院大学 札幌サテライト
- ゲーム&アニメ
- ANIA京都大会・京都府情報産業協会 10周年記念大会
- 特集 東日本大震災
- 北海道バイク紀行
- カワサキZ1開発責任者・大槻 幸雄氏特別講演会
- 古を語る星ぼし③ 晴明の日食と今年の日食
- 卒業生登場 (株)Tryden 吉田鐘一さん
- 卒業生登場 (株)イビソク 木村寛之さん
- ゆとり教育で不足した学力はどこで補完するのか ~社会人になるために~
- 漢詩 「初弘法( 東寺、一月二十一日)」
- 漢詩 「秋日訪山寺」
- 服装について
- 初代学院長の思い出
- 実践WEBサイト奮闘記
- 老人ホーム見学記
- KCG365 2011
- NEAC-2206が「情報処理技術遺産」に認定。長谷川靖子学院長に感謝状
- 「NEACシステム100」KCGで4機種目の情報処理技術遺産・認定機器に
- 加藤真也さん(情報学科)がMashup Awards U‐23賞を受賞
- 前納一希さん(ネットワーク学科)は「スマートフォン選手権・アプリがいっぱい賞」で3位
- 日本がフランス破り優勝,3連覇! CGアニカップ開催、全国から多数の アニメファンがKCGへ
- 西アフリカのニジェールにパソコンを寄贈IDCE23ヵ国目
- マラウイ共和国駐日大使から,コンピュータ寄贈に対しての感謝の手紙が届く
- 12万円以上の善意,東日本大震災被災者へ 「青海大地震の際の恩返し」留学生らが支援バザー
- 閑堂忌に合わせ、恒例のサマーフェスタ 地域の方々とKCGが交流
- 長谷川利治先生 追悼
- さよなら山本武先生
- アキューム20号(2011年発行)掲載広告
- Vol.19
- 京の表情〜四季彩々
- 日本初「コンピュータ博物館」構想―第二章―
- 風の街 シカゴ
- 特集 学校連携
- 上野季夫先生が百歳
- 上野季夫先生 百寿によせて
- おかえり「はやぶさ君」~奇跡の生還
- 古を語る星ぼし② 浦島太郎とかぐや姫
- 世界標準となった日本の工業製品に学ぶ 川崎重工のZ1
- MICTIプロジェクトを振り返って
- 初代学院長の思い出
- 漢詩 「葵祭 路頭之儀」
- 漢詩 「山寺観楓」
- 米山さんがU-20プロコンで受賞
- 卒業生登場 (株)N.ジェン<東京都渋谷区> 西角 光人さん・岡本 匡史さん
- KCG365 2010
- 閑堂忌に合わせサマーフェスタ2010を開催
- KCGI学長に茨木俊秀氏が就任
- KCGIと韓国・国立済州大学校 デュアルディグリープログラム運営で調印
- 京都駅前校近くに イオンモールKYOTO がオープン
- パプア・ゴロカ大学に「KCG・ハセガワ・ラボ」開設
- アキューム19号(2010年発行)掲載広告
- Vol.18
- 特集 世界天文年
- 日食のはなし
- 世界天文年2009 ~ガリレオから学ぶもの~
- 過去未来の大日食
- 日本初「コンピュータ博物館」構想始動
- 日本初のコンピュータ博物館設立に向けて
- コンピュータ博物館の設立に期待
- コンピュータ博物館の設立について
- 『実物コンピュータ博物館』設立について
- 歴史的価値は確実に残し,教育に反映を
- 「日本初 コンピュータ博物館構想」に寄せて
- 技術を末永く後世に
- 博物館は教育施設としても活用を
- 世界で初めてノート型PCを開発 溝口 哲也氏 講演(要旨)
- 鏡の中の右と左
- 福建師範大学での講義
- 漢詩「早春賦」
- 漢詩「早春偶成」
- 百賀の祝い 米田先生が百歳 KCG一同で祝う
- 米田先生 百歳の誕生会に
- 古都逍遥 最終回 白河校周辺5 ~北辺を訪ねる
- 30年目のベルリン
- 寄贈パソコンが開く世界への扉 パプアニューギニア
- 「日本・ドナウ交流年2009」認定事業 ダンス公演『Dance of Death ~生きるよろこび~』
- 初代学院長の思い出
- 卒業生登場 「日本の標準」づくりへ邁進
- 卒業生登場 「起業家という生き方」
- 3年目を迎えたKCGブログ
- 若い感性,中小企業の力に 学生が府中小企業団体中央会のHP構築
- 全授業eラーニング対応 「休校」はせず 新型インフル発生受け「教育受ける権利」重視
- KCG卒業生 木村寛之さんが「日本情報考古学会 堅田賞」を受賞
- KCG保護者会が結成 サークルやセミナー活動で連携を密に
- 初代学院長に静かに手を合わせ 閑堂忌,記念イベントも盛大に
- 世界初,現役ウィーン・フィル奏者+舞踏コンサート ~IDCE 20周年記念~ クラシック音楽の歴史に画期的一歩
- KCG365 2009
- 学生さんとKCGのコンピュータ
- 小規模大学の将来像の一形態;ネットワークマルチバーシティ
- アキューム18号(2009年発行)掲載広告
- Vol.17
- 次の時代へ 新たな誓い 京都コンピュータ学院創立45周年 京都情報大学院大学創立5周年
- 記念式典 式辞 京都コンピュータ学院創立45周年 京都情報大学院大学創立5周年
- 来賓祝辞 堀場 雅夫氏
- 来賓祝辞
- 記念祝賀会(校友祭典)
- ハーバード大学からの祝詞
- コロンビア大学からの祝詞
- 祝電一覧
- IDCE 海外コンピュータ教育支援活動
- 記念イベント・記念講演会
- そして50年へ
- パイオニア・スピリット 新島襄の生き方から考える。
- 特集 IT業界が求める人材 IT人材の不足~現状と課題~
- 特集 IT業界が求める人材 未来のCIOを育てるために~企業のIT化の促進とCIOの必要性~
- 特集 IT業界が求める人材 IT人材の確保のために~全国ソフトウェア協同組合の取り組み~
- 特集 IT業界が求める人材 IT業界の現在
- 卒業生特集 (株)エヌ・ジー・アイ・エフ 代表取締役 松野誠さん
- 卒業生特集 バルーンネット(株) 代表 井上清貴さん
- 卒業生特集 マッチロック(株) 代表取締役 藤本文彦さん
- 卒業生特集 ベニックソリューション(株) 桂 義幸さん
- KCG京都駅前校への玄関口 変貌遂げる京都駅 相次ぐ商業施設整備
- 古都逍遥 白河校周辺4
- ~京都・異文化交流~ベーグルの魔法
- 京都で一番!―これはびっくり裏京都案内―
- 平安の天文家
- MDDロボットチャレンジ参戦記
- KCGI学長に長谷川利治氏が就任
- 洛陽総合高校,京都聖カタリナ高校と相次ぎ連携事業協定
- 「日本初」のKCGが全面支援 天津科技大に中国初の自動車制御学科
- 四川省大地震 故郷の被災者や復興に支援を 中国人留学生ら市内街頭で義援金集め
- 日韓間サイバーキャンパス実現 KCGIが国立済州大学校と調印
- 世界初,遠隔システムでチェコ・パルドゥビッツェ大学と学術教育交流協定を締結
- KCG365 2008
- 初代学院長の思い出
- 漢詩「述懐」
- 漢詩「喜天津再訪」
- アキューム17号(2008年発行)掲載広告
- Vol.16
- 卒業生特集「最先端の証」
- Q-GAMES キュー・ゲームス-会社紹介
- IT を YouT へ-株式会社日本システムディベロップメント
- KCG同窓会@東京
- 澤田さん
- 漢詩「庭梅開花」「船岡山懐古」「長城懐古」
- 詩を創る,唐詩を教わる
- 京都へ,おかえりなさい。
- 京都まち探訪 伏見
- 古都逍遥 白河校周辺3
- 京都のラーメン考
- ゲーム業界の求める人材を育成するために
- ゲーム業界で活躍する卒業生たち
- ダッカの豊かな子どもたち
- サラエボ紀行
- 済州島
- 天津にて
- RIT紀行
- 教育支援の輪 さらに拡大
- KCG 365 2007年
- 初代学院長の思い出
- 火星のクレーター Miyamoto
- オープンソースカンファレンスがKCGにやってきた!
- オープンソースソフトウェアの魅力
- アキューム16号(2007年発行)掲載広告
- Vol.15
- KCG style 2006 コンピュータの未来を探る
- スコット・ロス氏 特別講演会 「What is Reality?」
- 9時間耐久レースでKCG教職員チーム優勝
- 頑張れば,多くの人が支えてくれる 「kcg.edu」インテグラドライバー 伊藤 裕士さんが引退
- 情報セキュリティの現在 日韓越3ヵ国共同セミナー開催
- 日韓越3カ国共同セミナー パネルディスカッション セキュリティってなに? -健全なユビキタス社会の実現に向けて
- 韓国のユビキタス社会実現に向けたセキュリティ対策
- Security of PKI in Ubiquitous Computing
- マイクロソフトのセキュリティへの取り組み ~Vista OSのセキュリティを通じて~
- 「高度専門士」をご存知ですか?
- 長谷川 靖子学院長が(財)日本ITU協会より「国際協力 特別賞」を受賞―記念のピアノコンサートも
- 財団法人日本ITU協会からの国際協力特別賞受賞に際して―海外コンピュータ教育支援活動―
- 学術交流
- 古都逍遥 白河校周辺2
- 漢詩「看櫻」
- 若い時代を振り返って
- シラーの戯曲を読む
- さよならプルート 冥王星の76年
- 京を生きる プロをめざし京都へ 洋画家・中村晴信さん
- 場違いコラム
- 京都情報大学院大学が第1回学位授与式
- KCGI第一期生が「株式会社At Izumi」設立
- 卒業生紹介 ~株式会社インターネットイニシアティブ 白石陽介さん
- 学院を廻るアルティザンたち 劇団PASSIONE 豊嶋文香
- 鮨
- 初代学院長の思い出
- 初代学院長の思い出 特別編
- 詩があるじゃないか
- アキューム15号(2006年発行)掲載広告
- Vol.14
- 新館竣工・自動車制御学科開設に際して
- 京都コンピュータ学院 京都駅前校新館 設備紹介
- 建築家 寺下 浩 インタビュー
- F1の革新とコンピュータ
- Car IT時代のエンジニア養成を目指して
- ベトナムとの交流について ― ベトナム最大のソフトウェア開発会社と事業提携
- 日韓友情年の推進に向けて
- モザンビークICT学院プロジェクト JICA専門家派遣報告
- ダンス公演 京都府舞台芸術振興事業「海心遊記」に参加して
- 日本画を生きる ― 今中 恵
- 古都逍遥 白河校周辺
- 初代学院長の思い出
- 専門職業人教育の制度的由来について― 日本最初のIT専門職大学院の設置に関連して―
- 世界技術者会議2004 参加報告
- 竹田の岡城と全日本実年ソフトボール大会
- 漢詩「夏日郊行」
- 随筆 冬の実
- 相対論誕生百年と安倍晴明没後千年
- 曜日・干支の起源と計算法
- 宇宙一の力持ち-グレートアトラクター
- ゲームプログラマへの道
- 一台のパソコンから全てが始まる
- ITで経営をデザインする
- アキューム14号(2005年発行)掲載広告
- Vol.13
- 京都コンピュータ学院創立40周年記念式典
- 創立40周年記念式典 学院長式辞 時代を拓く情報処理技術者育成をめざして
- 京都コンピュータ学院 創立40周年に寄せて
- 学問の未来と国の未来を担うコンピュータ
- 京都コンピュータ学院 創立40周年記念式典 祝辞
- 京都コンピュータ学院 創立40周年記念講演 「時代を拓くパイオニア・スピリッツ」
- 京都コンピュータ学院 創立40周年記念講演 「なぜ日本の教育に改革が必要なのか」
- 京都コンピュータ学院 創立40周年記念講演 「平和教育への原動力としての情報技術(IT)」
- 京都コンピュータ学院 創立40周年記念シンポジウム 「歴史を揺るがした星ぼし」
- 京都コンピュータ学院 創立40周年記念講演 「未来を拓く超高速コンピュータ」―コンピュータに何ができるのか
- 日本最初にして唯一のIT専門職大学院 京都情報大学院大学 開学
- 京都情報大学院大学開学に向けて
- 京都情報大学院大学 開学記念式典
- 京都情報大学院大学 開学記念式典 理事長式辞
- 京都情報大学院大学 開学記念式典 学長挨拶
- 京都情報大学院大学 開学記念式典 来賓祝辞
- 京都情報大学院大学 開学記念式典 ロチェスター工科大学からのメッセージ
- 京都情報大学院大学 開学記念式典 コロンビア大学教育大学院からのメッセージ
- 京都情報大学院大学 開学記念式典 イリノイ大学アーバナ・シャンペーン校からのメッセージ
- 京都情報大学院大学 開学記念パーティー
- 京都情報大学院大学設立に際して
- 京都情報大学院大学の設備・概要
- 日本最初のIT専門職大学院で学ぶ
- 京都情報大学院大学「ウェブビジネス技術専攻」のカリキュラム
- 京都情報大学院大学 開学記念式典 メッセージ
- 京都情報大学院大学 開学記念式典 祝電
- 初代学院長の思い出
- 古都逍遥 京都駅前校の北辺
- 漢詩「夏日山居」
- 第3世代携帯電話アプリの開発とゲームデザイン― 日本と世界―
- NAIS発足式
- 小説 「雪見 -城崎にて」
- 校友祭典2003 Pioneer Spirit-KCG
- 創立40周年記念行事
- アキューム13号(2004年発行)掲載広告
- Vol.12
- 創立40周年記念の佳節を迎えて
- グローバルな教育ネットワーク
- 京都コンピュータ学院40年の歩み
- 京都コンピュータ学院 創立40周年記念行事スケジュール
- 私が見たモンゴル国
- 情報学 情報学科4年課程設置に際して
- デジタルシティと異文化コミュニケーション -社会情報学に向けて
- IT革命のパラダイムシフトと情報処理教育
- データベースの理論とその発展
- 情報学科が目指す教育
- The Internet2 - Dance in the Digital Age
- 学院NOW
- 大学崩壊と専門学校の優位性
- 中国のIT産業の現状と大学教育
- 日本語教育におけるオンライン教材の可能性
- 南アフリカ共和国・ヨハネスブルグ 「国連・持続可能な開発のための世界会議」レポート
- 宇宙の誕生と宇宙の未来
- 歴史を揺るがした星ぼし
- 携帯アプリ黎明期のゲームデザイン
- 40年前,日本人の大リーガーがいた!~マッシー村上~
- 古都逍遥 百万遍校周辺
- 初代学院長の思い出
- 漢詩「山寺観楓」「山寺観楓有感」
- ロバート・B・クッシュナー先生追悼
- 老師と大河
- Old Professor and The River (Dedicated to“Kush”)
- デジタルな音楽表現の長所と短所
- 学院を廻るアルティザンたち イラストレータ&CGデザイナー 今崎寛之
- 卒業生紹介 株式会社 CSK 松井博也氏
- アキューム12号(2003年発行)掲載広告
- Vol.11
- 米国同時多発テロに思う
- 京都コンピュータ学院ニューヨークオフィス崩壊当日
- 米国同時多発テロの現場から
- ハーバード・メモリアル・チャーチ 聖書の言葉と説教 2001年10月23日
- 我が都市 New York
- 米国同時多発テロから五ヶ月
- 大学に挑戦する専門学校―教育の危機・就職の危機こそ最大のチャンス
- Japan's System of Post-Secondary Education
- 日本の中等後教育制度(高等教育制度)(邦訳)
- 大学崩壊の時代―学校経営の視点から
- 21世紀のIT教育―本格的IT教育を目指して
- eラーニングの市場動向
- IT時代のプログラミング指南
- すばるをめぐって
- 第5回JAHOU集会を終えて
- KCGキャリア
- 学院NOW
- 初代学院長の思い出 ―思い出は尽きない
- 漢詩「冬夜偶成」
- 古都逍遥 鴨川校洛北校周辺
- コンピュータ・プログラムと著作権
- コンピュータの省エネルギー化
- 形状情報処理について
- ランドマークベースの音声認識において最適な指標を求める方法
- KCG RIT 姉妹校提携5周年を迎えて
- KCGとRITの友好関係を築いて
- 妖怪乱舞 陰陽座
- 学院を廻るアルティザンたち 映像作家 石橋義正
- 卒業生紹介 卒業生が最先端 藤井康彦さん
- アキューム11号(2002年発行)掲載広告
- Vol.10
- 巻頭言 21世紀を迎えて・・IT時代は「情報と頭脳」の時代 ―システムの創造的破壊とソリューション教育を―
- 中国,二大学との教育提携 日本語教育とコンピュータ教育の融合をめざして
- 月下独酌~NEW YORK~
- 地球温暖化研究の現状
- バリ紀行
- IT革命とはなにか
- わたしの考える「IT革命」 その虚実皮膜について
- 「専門家」から「非専門家」へ。―「非専門職」のススメ―
- インターネットと知的財産権法
- 中国のコンピュータ事情
- 海外で新米コンサルタント就職奮戦記 しなやかに あっけらかんと したたかに
- 初代学院長の思い出
- 知恵〔智慧〕の時代
- コミュニケーションのための―きく・話す―
- Y2K, on Z2
- 漢詩「緑陰讀書」「鴨川看白鷺」
- 陰陽師 安倍晴明の見た星
- 古都逍遥 京都駅前校周辺
- 世阿弥二題
- アートスペース紹介 ICC NTTインターコミュニケーションセンター
- はるかなるうみのはて
- 中島修彫刻展
- 卒業生紹介 古都京都に在る,小さな小さな大きい会社!
- アキューム10号(2001年発行)掲載広告
- Vol.9
- 創立35周年を迎えて(1998.11.18)
- 創立35周年記念イベント
- 創立35周年記念式典 パソコン贈呈式
- 海外コンピュータ教育支援活動 スリランカ
- 海外コンピュータ教育支援活動 ブルネイ
- 海外コンピュータ教育支援活動年表(1996年以降)
- 海外コンピュータ教育支援活動 北京・天津・西安
- 35周年記念座談会 新しい高速コンピュータの誕生―TOSBAC 3400 開発の思い出―
- 卒業生寄稿 情報化版 温故知新
- 卒業生寄稿 システムコンサルタントを目指す人達に
- 日本の私学と「専門学校」の概念
- 抽象の力
- 漢詩「初夏偶吟」「秋日郊行」
- 曲阜行 孔孟の跡を訪ねる
- コミュニケーションメディアとしてのコンピュータ
- ゲーム開発科の目指すもの
- 上野季夫先生と輻射輸達論の五十年
- 閑堂忌について-「一身独立の気力」-
- 初代学院長の思い出
- 木版画「人間の位置」
- 小惑星 Shotaro
- 五星聚井
- 21世紀の新文化首都 関西文化学術研究都市の試み
- 京都コンピュータ学院創立35周年記念イベント 最先端マルチメディアイベント
- 卒業生紹介 未知へのチャレンジ精神
- アキューム9号(1999年発行)掲載広告
- Vol.7-8
- 巻頭言 社会・文化の大変容期を迎えて ―文化としてのコンピュータ―
- 海外コンピュータ教育支援活動 ペルーへ
- アフリカ・中東・南米へひろがる海外コンピュータ教育支援活動
- 海外コンピュータ教育支援活動 メキシコからの研修生を迎えて
- 海外コンピュータ教育支援活動 タイ国マヒドン大学に滞在して
- 情報処理教育に求められるもの 4年制情報工学科の発足にあたって
- 二期制実施とカリキュラム改革
- インターネットの発展と私のホームページ作り
- 第15回京都コンピュータ学院卒業研究発表会
- 研究所だより
- 京都コンピュ-タ学院とオペレ-ションズ・リサ-チ
- ADEOS衛星搭載のPOLDERセンサ画像データについて
- 学院ニュース
- 初代学院長から伝えられた言葉
- 漢詩「惜花」「梅雨書懐」
- 詩とのつきあい
- 熊楠の手紙
- 宮沢賢治生誕百年に寄せる 「雨ニモマケズ」入門
- 「日本科学教育学会研究会」京都駅前校で開催される
- 世界最高速のコンピュータを作る
- シンポジウム「降着円盤の基礎物理」 天文の数値計算とコンピュータ
- 天文学のニュートレンド(降着円盤)
- 太陽とその活動
- 新惑星系の発見
- RITの日々
- R・I・Tと本学院との姉妹校提携実現に際して
- 芸術情報学科 学生CG作品
- 卒業生紹介 学院スピリッツ
- アキューム7-8号(1997年発行)掲載広告
- Vol.6
- 海外コンピュータ教育支援活動5周年を迎えて
- ポーランド日本情報大学の誕生
- ジンバブエ現地講習会報告
- ペルーへ向けてパソコン出発
- 対サウジアラビア王国支援 京都講習会
- 宇宙の果てに挑む ―新技術が拓く宇宙のフロンティア
- 出会い 中国の旅から
- 不変埋蔵の原理と動的計画の科学
- 不変埋蔵法とシステム同定
- ダイナミック・プログラミング
- 不変埋蔵法と生物医学への応用
- 遺伝アルゴリズムについて
- 研究所だより
- 有為転変 学院の設備更新に際し人材の育成を思う
- 夢のあるコンピュータの世界を
- システム創造のためのワープロ活用術
- 便利さと人間<性悪説>-個人情報保護のためのラディカルな問い
- 誰にでも使えるパソコン・BTRON~未来のパソコンのあるべき姿を見る~
- 初代学院長の思い出
- 京都コンピュータ学院校友会エグゼクティブクラブ結成式校友会長挨拶
- 京都コンピュータ学院校友会エグゼクティブクラブ国際協力事業推進委員会活動報告
- 就職難・リストラの嵐の前衛的突破法
- X線で見た宇宙
- 危ない小惑星
- 情報の天才-空海という人
- 卒業生紹介 情報化時代の啓蒙家
- アキューム6号(1995年発行)掲載広告
- Vol.5
- 巻頭言 学院創立30周年を迎えて
- 学院創立30周年記念特集 情報の哲学 21世紀のノヴム・オルガヌムを求めて
- 「人工知能と人間」(岩波新書)の著者,京都大学工学部教授長尾真氏に聞く。情報科学的視点は,世界をどう変えるか?
- 人間知性理解の二つの議論 -合理論と経験論
- 心の哲学について
- 孔子とのQAシステム
- 梅棹忠夫『情報の文明学』(中公叢書)を読んで
- 寧夏・内蒙の旅 留学生Y君に寄せる
- 研究への発想・発見・発明,意図した成果・意図せぬ発見,早過ぎる独創は権威ある大家も否定する
- 地上の実験室でクォーク・グルオンプラズマを造る-我々はビッグバン直後に到達できるか
- 狂言を語る 茂山千五郎
- 在京懐京(きょうにありてきょうをおもう) 京に老いてはシルバーシート?の巻
- 研究所だより
- モンタージュの魔術
- 「ナチ宣伝」という神話
- 認知の科学
- 認知革命?
- 脳とコンピュータ ―意識を持つ機械を目指して―
- 認知科学と人間の心理 ―機械の知が超えることのできない人間の知とは何か?
- 人工の目 移動物体識別追尾装置
- スキゾフレニアと世界のまなざし
- 茶碗の音
- 音声コミュニケーションの脳内メカニズム 人工知能が言葉を理解するためには
- 権力・文学・国家保安局
- 宮本正太郎先生をお偲びして
- 岩崎直子先生逝去 京都コンピュータ学院の支柱となった先生の功績と,その生命の永遠さを讃えて
- 初代学院長の思い出 とこしえの夢 ―前学院長,父との別れ―
- 星野恒彦句集「連凧」を読んで
- 漢詩
- 京都コンピュータ学院による海外コンピュータ教育支援活動 関連記事
- 対ケニア共和国コンピュータ教育支援活動 悠久なる大地ケニア
- 対ケニア共和国コンピュータ教育支援活動 花を咲かせる旅
- 対ケニア共和国コンピュータ教育支援活動 ナイロビ講習会
- 学院のみなさんJAMBO!! 京都短期留学 ケニア人研究者・教授16名
- ソフトウェア教育の改善を目指して
- ソフトウェア教育の発展を阻害するもの
- ガーナ共和国訪問記 行く河の流れは
- ガーナ共和国ケープコーストにヤスコ・ハセガワ・コンピュータセンター設立!
- 地球に近づく小天体
- 超新星とその残骸
- 宇宙背景放射とダークマター
- はくちょう座の星々-臨終の星が蘇る
- もう一つの国際交流 伝統文化継承に関する相互補完
- 卒業生紹介 学院スピリッツ
- アキューム5号(1993年発行)掲載広告
- Vol.4
- 京都駅前校舎大講堂の音響設計
- MESSAGE 学生達へ・・・
- 京都駅前校舎竣工記念フェスティバル
- 京都駅前校舎竣工記念式典・海外留学生研修オープニングセレモニー
- 京都駅前校舎竣工記念講演 国際化社会における日本の教育-世界の中の日本 期待される人間像をめぐって-
- 京都コンピュータ学院ボストン校創立者 長谷川由さん米国ハーバード大学大学院の卒業式で代表スピーチ
- 情報とは・情報化社会とは
- 「認知科学」へのいざない
- 情報教育懇話会 情報教育の現状
- 宇宙創世のロマン-アインシュタイン宇宙よりホーキング・佐藤の宇宙へ-
- 聖徳太子は南十字星を見た? 地球の首振り運動
- 生命とは
- 星間物質の化学と生命の起源
- 太陽系の有機物と生命の起源
- 地球生物の起源
- バイオの主役 DNAとは
- 遺伝情報の変化と発がんの機構 DNA修復
- 放射線治療に関連して 生体に対する放射線の影響
- 研究所だより
- 京の伝統芸能 能そして歌舞伎
- 教養としての伝統文化
- C&Cと高度情報化社会
- ヒューマン・インターフェイス
- 人にやさしいコンピュータを目指して
- ペン インターフェース PCについて
- 最先端技術とその応用
- 地球サイズの情報文化創造へ
- ガーナ印象記
- 対ガーナ情報教育振興事業 アクラ講習会
- 香港 ベルリンそしてワルシャワ
- ポーランド共和国文部省からの挨拶
- タイ・ガーナ・ポーランド 海外短期研修生を迎えて
- バートランド・ラッセル 教育論を読んで
- 初代学院長の思い出 京大音研
- 卒業生紹介 青年海外協力隊-ジャマイカ派遣を終えて
- アキューム4号(1992年発行)掲載広告
- Vol.3
- ほほえみのくに
- バンコック・パソコン講習会
- タイ・ベネフィット・ガラ
- タイ教員短期留学
- タイ視察旅行から
- 年間3600人のコンピュータ技術者を養成するために
- 対ガーナ情報教育振興事業について
- 対ポーランド情報教育振興事業について
- スーパーコンピューティングとシミュレーション天文学
- こんにちは星の赤ちゃん
- 宇宙の大規模構造
- パソコンのなかの惑星たち
- 知的財産権とコンピュータプログラム
- 初代学院長の思い出 よき時代の想い出
- 初代学院長の思い出 真の優しさ
- 情報の科学
- 情報科学をめぐって
- コンピュータ・ハードウェア技術の発展
- 情報化社会としなやかなシステム
- マルチメディア通信について
- 情報系システムに求められる知的支援を考える
- 連想記憶モデルによる情報の最適識別
- ニューロ理論の理解のために〈脳の働き〉
- ニューロ(神経回路網)理論による自動制御
- ファジィ理論と応用
- 三次元グラフィックスによる山岳景観の表示システム
- 考古学における土器文様とコンピュータ
- 放射線医用画像の解析
- イギリス文部大臣K・クラーク氏 京都コンピュータ学院を視察
- イギリスにおけるコンピュータと情報技術の高等教育
- 現代詩
- 地球温暖化の諸問題
- オーストラリア大陸縦断 ソーラーカーレースに参加して
- 世界の英語ハイク
- 常磐津を語る
- 京都の自然 海岸の松の緑を守るために幻のきのこ,松露を育てる
- 学院を廻るアルティザンたち-(3) Robert B.Kushner ロバート・クッシュナー
- 卒業生紹介 天草の禅寺コンピュータ和尚
- アキューム3号(1991年発行)掲載広告
- Vol.2
- 宇宙と俳句
- ボイジャー2号の見た海王星
- 宇宙ジェットSS433
- 京都コンピュータ学院による対タイ情報教育振興事業
- 同志社の創立者 新島襄と現代
- 若き日の長谷川繁雄初代学院長
- 1991年の惑星直列
- 悪徳商法雑感
- 世のなか,非線形
- 地球環境の科学
- グリーンハウスエフェクト
- マルチスペクトル衛星画像のコンピュータ解析による雲の研究
- マングローブ
- 衛星による地球モニターシステム
- 東南アジアの環境変化の一断面
- 京都コンピュータ学院NEWS
- 宇宙からの地球探査
- 人工衛星による地球画像の解析について
- 宇宙からの地球環境監視
- レーザーレーダーによる地球大気内のエアロゾル等の探査について
- 海洋探査と水色研究
- 高分解能人工衛星画像の領域分割と認識処理
- 「天文学的数字」ほどの情報処理
- 情報処理教育について
- バイオテクノロジーは何をもたらすか
- 現代中国 コンピュータ産業の現状と展望
- 現代詩
- 京都を語る
- 京都コンピュータ学院ボストン校設立の旨
- 第1回ボストン研修のはじまり -オープニングセレモニー
- 学院を廻るアルティザンたち(2) ロバート・メズベン
- 今後の情報処理技術者に求められること
- THE AUDIENCE
- アキューム2号(1990年発行)掲載広告
- Vol.1
- 創刊巻頭言
- 火星の極冠を計算する
- 火星の白雲の振舞い
- 恒星の固有運動
- 独立独行のひと 初代学院長の思い出
- 初代学院長の思い出
- 京都コンピュータ学院 創立25周年記念式典
- 25年! 熟成されたアイデンティティ 創立25周年記念式典学院長式辞
- 上空700kmからの視点 創立25周年記念式典式辞
- 京都コンピュータ学院は文化を創造する 創立25周年記念式典祝辞
- 学院の慧眼に敬服 創立25周年記念式典祝辞
- 先取りした精神と熱い情熱 創立25周年記念式典祝辞
- 国家試験合格者全国最優秀校としての事実 創立25周年記念式典祝辞
- 国際化に向かう先見性 創立25周年記念式典祝辞
- 創立25周年記念式典 記念講演(抄録)
- 創立25周年記念校友大会 朋友遠方より来る
- 創立25周年記念校友大会 また楽しからずや
- 創立25周年記念校友大会 協賛・協力企業一覧
- コンピュータ技術とその国際性
- 宇宙からの気象観測 スーパーコンピュータとともに
- 情報処理教育に求められること
- 現代詩 早稲田大学同人誌サークル「行李」より
- 都の四季
- 同志社(キリスト教学校)はこうして京都(神仏の街)に誕生した
- 映画のような町
- ショートストーリー Tに捧げるサーモンピンク
- 小面(こおもて)と乙(おと)-能と狂言-
- 対談「文化の交流」
- 学院を廻るアルティザンたち(1)キャロリーナ・デ・ウァールト
- 情報と文化のメビウス環
- 学園歳時記 学院プロモーションビデオ制作日記
- アキューム1号(1989年発行)掲載広告
Accumu Vol.5
人工の目 移動物体識別追尾装置
大分大学工学部電気電子工学科教授 杉坂 政典
はじめに
人の目は移動している物体が何であるかを一瞬のうちに認識し,それを追尾することができる。そのような人の目に似た働きをするものを工学的に実現するためには,眼球の動きや,目から入る視覚情報の処理の仕方,また物体をいかに認識しているかといった脳の情報処理の機序が解明されており,それを実現するためのセンサや人工脳を模擬できるコンピュータなどの高度なハードウェアの技術がある程度確立されていることが必要である。筆者の研究室では,人の目に似た機能をもつ人工の目(移動物体識別追尾装置)を試作し,その目に人工脳を付加するための研究を始めている。
本稿では,試作した人工の目が低高速で移動する物体をどのような方法で認識し,人工脳の一部とみなせるニューロコンピュータをいかに使っているか,また,どのような制御法を用いて追尾を行っているのかについて紹介する。
移動物体識別追尾装置
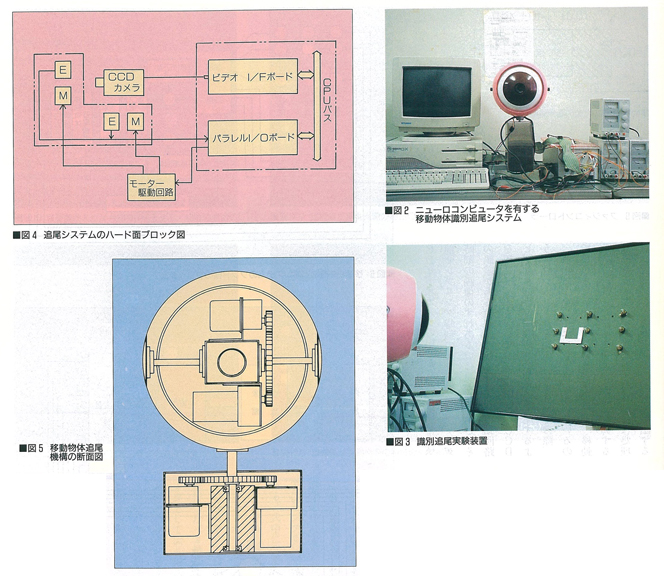
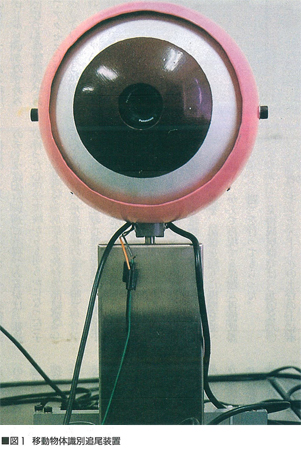
図1に移動物体識別追尾装置の外観写真を示す。図2に人工神経回路網(ニューラルネットワーク)をコンピュータ内にもつ装置システム,図3に識別と追尾に用いた光源を当てる黒板とパターン及び視覚装置の写真を示す。図4に追尾システムのハード面の概略のブロック図,図5に移動物体追尾機構の断面図が示されている。この装置は移動する対象物が何であるかを識別し,その対象物を自動的に追尾することができる。
図4に示すように,システムはCCDビデオカメラと水平軸(x軸)上,垂直軸(y軸)上を移動する2個のエンコーダ付DCモータ及びそれらのモータを駆動するPWM(パルス幅変調)駆動回路から成る。また,対象物の識別を行うための人工神経回路網,PID(比例,積分,微分)制御やファジィ制御演算を実行し,PWM回路の電流のオン・オフの割合,すなわち,デューティ比をサンプリング周期毎に変えて指令を出すためのマイクロコンピュータPC9801とそのインターフェースから成る。追尾機構が人間の眼球(人工の目)に相当し,マイクロコンピュータやインターフェースの部分が人間の脳(人工脳)に相当するものと考えてよい。
図5に示すように,下部に架台を設け,その中に水平移動用DCモータとエンコーダを固定している。また架台に取り付けた外球とその内側に垂直移動用DCモータとエンコーダを取り付け,可動可能にした内球にCCDビデオカメラが固定されている。カメラはレンズが向けられている方向に向かって,右側と左側の水平方向にプラス60度,マイナス60度の範囲内で可動であり,上側と下側の垂直方向にプラス45度,マイナス45度の範囲内で可動である。2個のDCモータは前述の角度の範囲外では,仮にコンピュータから信号を受けたとしても動作しないようにハード面からロックされている。移動物体識別追尾システムの可動範囲は現在このように設定されている。
画像処理とパターン識別
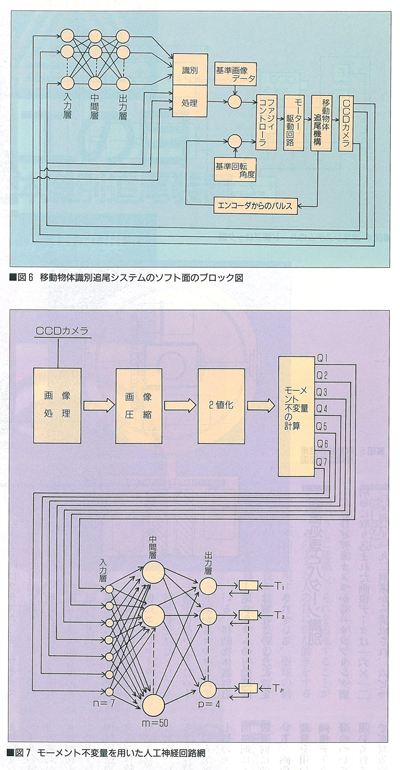
CCDビデオカメラから1サンプリング周期毎に取り込まれた画像データは16×12(行×列)=192画素から構成され,6ビットの値,すなわち,輝度が0~63の64階調から成っている。追尾システムには白黒画像が現在用いられている。得られた画像データの処理法として色々考えられる。そのうち,識別に関しては,移動物体を識別させるため,三層の人工神経回路網を用い,学習には逆誤差伝播法を使用している。参考のため,識別追尾システムのソフト面の概略図を図6に示す。画像処理部はこの図からわかるようにCCDビデオカメラから取り込まれた画像を直接処理する部分と,学習済み人工神経回路網で処理して識別する部分から成る。人工神経回路網の入力層に直接画像データを入力として加え処理を行った場合,回転したパターン,スケールの違ったパターン,移動したパターン等の識別が困難であり,さらに処理するデータ量が膨大となるなどの難点がある。従って,このような難点を解決するための特殊な人工神経回路網を考案した。すなわち,対象物パターンに特有の7個のモーメント不変量(Q1-Q7)を計算し,それを人工神経回路網の入力層に加え,いわゆる動的パターンの識別ができるように特殊な人工神経回路網を用いている。この人工神経回路網の概略図を図7に示す。7個のモーメント不変量を計算し,人工神経回路網に入れ識別する方法は,むき身の栗の等級選別に効果的であることが明らかにされている。画像パターンの識別にはモーメント不変量を用いた人工神経回路網が用いられるが,画像データを直接処理し対象物を追尾する部分については,図6に示すような追尾機構が用いられる。すなわち,現サンプリング時刻で,対象物の移動によりその画像データがCCDビデオカメラの中心からずれた場合には,前サンプリング時刻の画像と現サンプリング時刻の画像のずれあるいは誤差を検出し,その誤差がある範囲内に収まるように駆動回路を用いて水平・垂直軸モータを回転し,CCDビデオカメラの中心が移動物体に追尾するようにコントローラを制御している。その際,2個のモータにはエンコーダが付いているのでCCDビデオカメラの位置を検出し,移動位置を計算しながらモータの速度を制御する方法を採用している。追尾のための画像処理には図8に示すような図形のずれを検出する方法や輝度の最大値を検出する方法が考えられる。次に輝度の最大値を検出する方法を用いた実験結果について示す。
PWMによる追尾制御
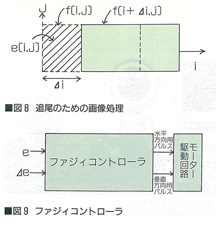
図6では,コントローラとしてファジィ制御則に基づいたファジィコントローラが示されているが,コントローラとしてPID制御則に基づいたPIDコントローラやその他,適応制御・最適制御則等に基づいた種々のコントローラが考えられる。追尾制御実験では,PIDコントローラと図9に示すように,偏差と偏差の変化分を入力として水平垂直方向のパルスのデューティ比を出力とするファジィコントローラの2種類が用いられた。ファジィコントローラの実験結果については別の機会に譲ることにし,本稿ではPIDコントローラを用いた場合の実験結果について述べる。
PID制御はすでに示したように,比例(P)・積分(I)・微分(D)制御の略であり,目標値と出力の偏差に比例したもの,偏差を積分したもの,偏差を微分したものをある一定の比率で加え合わせたものを制御量として用いる制御法である。実験では,普通用いられるPID制御則を若干修正したものを用いた。
次に視覚装置に用いられた追尾の手順を示す。(1)始めに移動物体の画像データをCCDビデオカメラからマイクロコンピュータに取り込む。(2)次に移動物体の画像の最大輝度を検出する。(3)CCDビデオカメラの現在の位置をエンコーダで読み,マイクロコンピュータに取り込む。現在の位置が画像の中心になるようにカメラを移動する。すなわち,カメラの位置(i,j)と画像の中心の間の偏差を計算し,PID制御則により速度を制御しながらカメラを画像の中心に移動する。(4)画像データをマイクロコンピュータに取り込む時間が約30分の1ミリ秒であり,従って,画像取り込みに30分の1ミリ秒以上のタイマーを用いる。実験では100ミリ秒のタイマーを8253で割り込み処理を用いて生成した。(5)(1)から(4)の手順を繰り返し実行し,移動物体をある誤差内で追尾する。以上の手順を用いて追尾実験を行った。
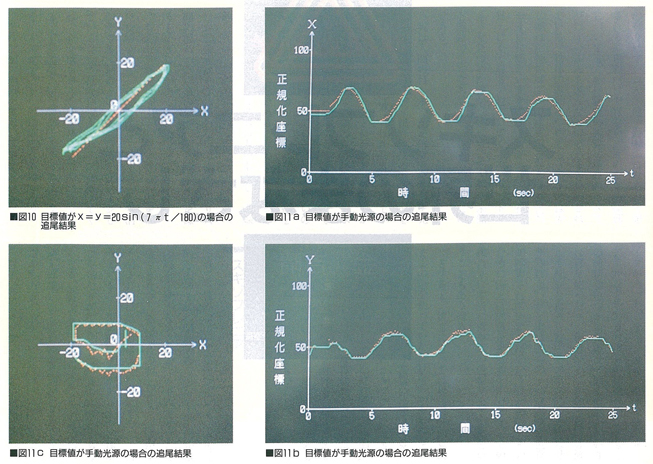
図2の移動物体識別追尾システムを用いてパターン識別実験と追尾制御実験を行った。パターン識別実験結果は紙面の都合上省略する。PID制御則として次式を用いた。
Vn=K{en+Ts(Σen)/Ti
Wn=Vn+Td(Vn-Vn-1)/Ts
Un={Wn+(0.1T'd/Ts)Un-1}/(1+0.1Td/Ts)
ここで,Unはnサンプリング時刻のDCモータの速度出力,enはnサンプリング時刻の画像の中心とCCDビデオカメラの位置の偏差,Tsはサンプリング周期,VnとWnは補助変数である。式中に含まれるパラメータK,Ti,Tdはそれぞれ比例ゲイン,積分時間,微分時間である。水平軸(x軸)及び垂直軸(y軸)モータの速度をPID制御則で制御し,追尾実験を行った。x軸モータのPID制御のパラメータとしてK=2.50,Ti=150.0,Td=0.700,y軸モータのパラメータとしてK=4.00,Ti=150.0,Td=0.700を採用し,目標値を
x=y=20sin(7πt/180)
と設定し,25秒間追尾を行った結果を図10に示す。赤色の点線が目標値を示し,緑色の実線が15秒間追尾したときの軌跡を示している。この図ではわからないが,最初目標値との偏差が大きく,時間の経過と共に偏差が小さくなる。すなわち,画面上では緑色の実線が次第に赤色の点線に近づいていった。図11a・b・cは,手動光源を目標値としたときの25秒間の追尾結果を表している。用いたPID制御のパラメータは図10の場合と全く同じで目標値のみが異なっている。図11a・bはそれぞれx軸y軸モータの追尾を表しており,縦軸にx軸y軸のモータのエンコーダ値に50を加えたものをとり,横軸に時間をとっている。図11cにそれを2次元平面で表示している。前と同様に赤色の点線が目標値で,緑色の実線が追尾の軌跡である。追尾実験の結果よりパラメータを適当に選ぶことにより,PIDコントローラは精度よく移動物体に追尾できることがわかる。
おわりに
本稿では,試作した移動物体識別追尾装置について簡単に紹介し,その装置がいかに移動物体を識別し,どのように追尾しているかについて述べた。テーマで人工の目と大きなテーマを掲げたが,人工の目を実現するためには,一対の眼球から成る目や,人工脳をハード・ソフトの両面から研究開発することが今後一層望まれる。それにより,人工の目や脳をもつ機械が近い将来,人間の代わりに宇宙,深海,原子炉内等で働いたり,また,身近な日常生活ではアシスタントとして役立ってくれるものと期待している。
なお,本稿で紹介された移動物体を識別する人工神経回路網の基本部分は,京都コンピュータ学院情報科学研究所所長上野季夫先生との共同研究から開発されたものである。